RL.CS285
CS285 - 2019
http://rail.eecs.berkeley.edu/deeprlcourse/resources
https://www.bilibili.com/video/BV15441127ua/
Notations
t - timestep t
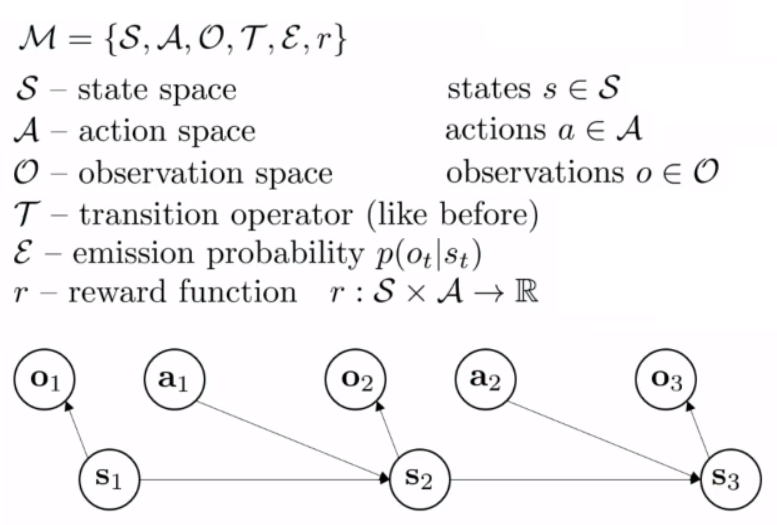
$s_t$ - state
$o_t$ - observation
$a_t$ - action
$\pi_\theta(a_t|o_t)$ - policy (partially observed)
$\pi_\theta(a_t|s_t)$ - policy (fully observed)
$p_{data}(o_t)$ - 符合data分布的数据,i.e. 采样得到的observation
$p_{\pi_\theta}(o_t)$ - 符合$\pi_\theta$分布的数据,i.e. 运行model得到的新observation
$\tau$ - Trajectory,运行model得到的一系列($s_t$,$a_t$)组合
Imitation Learning
准备好数据集,进行supervised learning;然而随着timestep推进,训练集与实际state的细微差别会越来越大:
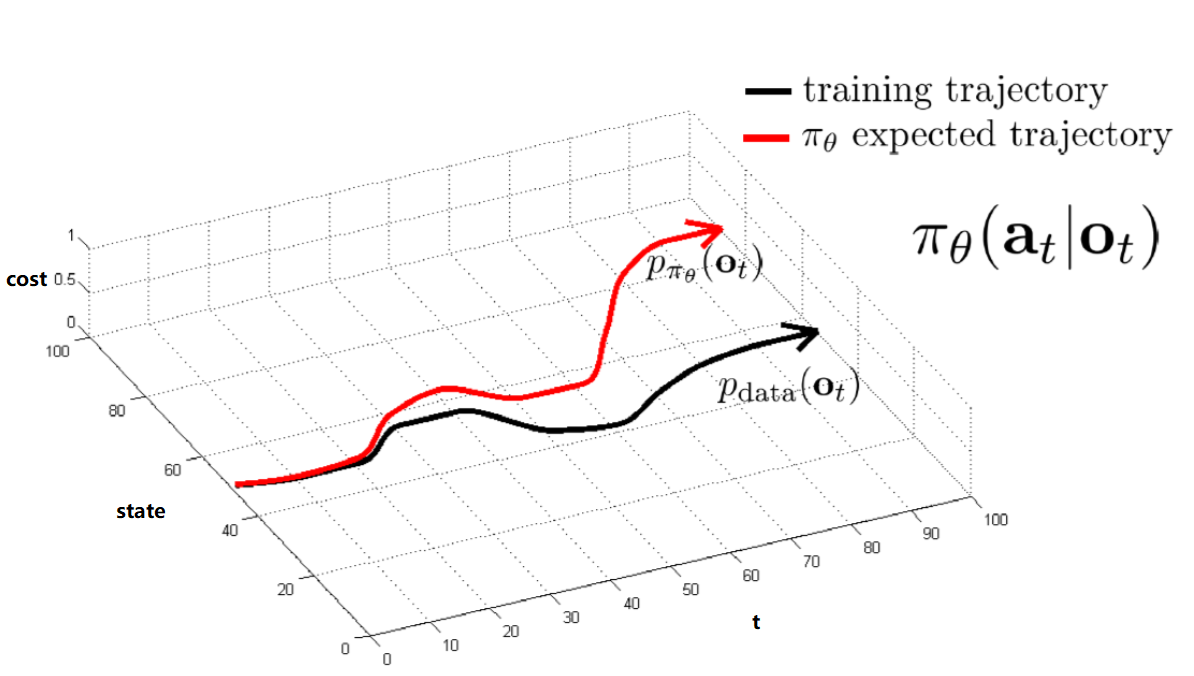
为了尽量使 $p_{data}(o_t) = p_{\pi_\theta}(o_t)$,有智能驾驶的两个实例:
- DAgger:直接安装$p_{\pi_\theta}(o_t)$收集数据,i.e.运行 policy 生成新 observation 后再人工加上注释
- Stable Controller:车两侧各加上摄像头,提供了轻微偏离 Trajectory 的数据,一旦有偏离是苗条就可以及时修正
有时训练的 model 并不能很好的模仿训练数据,原因可能有:
- non-markovian: $\pi_\theta(a_t|o_t) \neq \pi_\theta(a_t|o_1 ... o_t)$;此时应改用state
- causal confution: e.g. 训练自动驾驶时见人应停,但事实上模型误以为见刹车灯亮起应停
- Multimodel behavior:
| 模型 | -- | -- |
|---|---|---|
| Gaussian Models | $\pi_\theta(a_t|o_t)=\sum_i{w_iN(\mu_i,\Sigma_i)}$ | NN最外层输出n组$w_i,\mu_i,\Sigma_i$;缺点是action space有限 |
| Latent variable models | 依据某种分布生成随机输入训练NN,希望能够展示不同 modes | VAE |
| Autoregressive Discretization | 将高维 action space 离散化 单层dim可以加softmax来离散化 可以是RNN模型 |
img作为NN输入 输出的Dim_1离散化后得到Val_1 img+Val_1作为NN输入 输出的Dim_2离散化后得到Value_3 ... |
Cost/Reward
$c(s,a)=$ 0 if $a=\pi^{\ast}(s)$ otherwise 1
$r(s,a) = logp(a=\pi^{\ast}(s)|s)$
Naive $O(\epsilon T^2)$
Assume for all $s \in D_{train}$, $\pi_{\theta}(a \neq \pi^{\ast}(s)|s) \leq \epsilon$,
$E[\sum_tc(s_t,a_t)] \leq \epsilon T + (1-\epsilon)(\epsilon (T-1)+(1-\epsilon)(...))$ ----> T terms, each $O(\epsilon T)$
Dagger $O(\epsilon T)$
Assume for all $s \in p_{train}(s)$, $\pi_{\theta}(a \neq \pi^{\ast}(s)|s) \leq \epsilon$,
$E[\sum_tc(s_t,a_t)] \leq \epsilon T $
Behavial Cloning $O(2\epsilon T^2)$
Assume $p_{train}(s) \neq p_{\theta}(s)$,
Step1: $p_{\theta}(s_t) = (1-\epsilon)^tp_{train}(s_t) + (1-(1-\epsilon)^t)p_{mistake}(s_t)$
Step2: $|p_{\theta}(s_t)-p_{train}(s_t)| = (1-(1-\epsilon)^t)|p_{mistake}(s_t)-p_{train}(s_t)|$
$\qquad \leq (1-(1-\epsilon)^t) \times 2$ $\qquad \because p\in[0,1]$
$\qquad \leq 2\epsilon t$
Step3: $\sum_tE_{p_{\theta}(s_t)}[c_t]=\sum_t{\sum_{s_t}p_{\theta}(s_t)c_t(s_t)}$
$\qquad \leq(\sum_t{p_{tr} + (p_{\theta}-p_{tr})}) \times c_{max} $
$\qquad \leq(\sum_t{p_{tr} + (p_{\theta}-p_{tr})}) \times 1 $
$\qquad \leq \sum_t{\epsilon+ 2\epsilon t}$
$\qquad \leq \ \epsilon T+ 2\epsilon T^2$
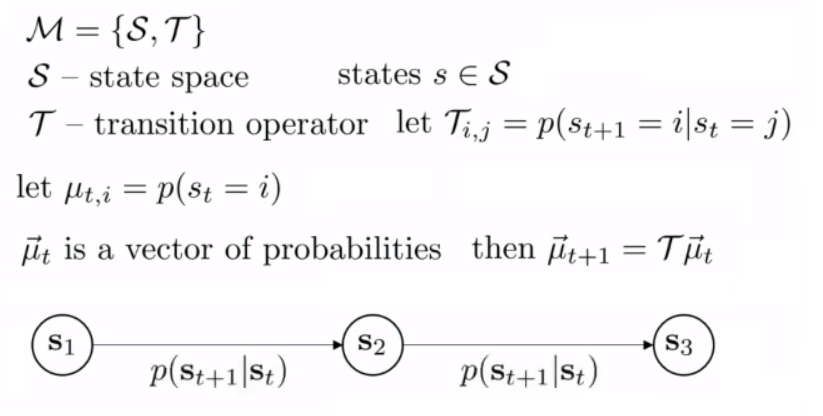
Markov
Markov Chain
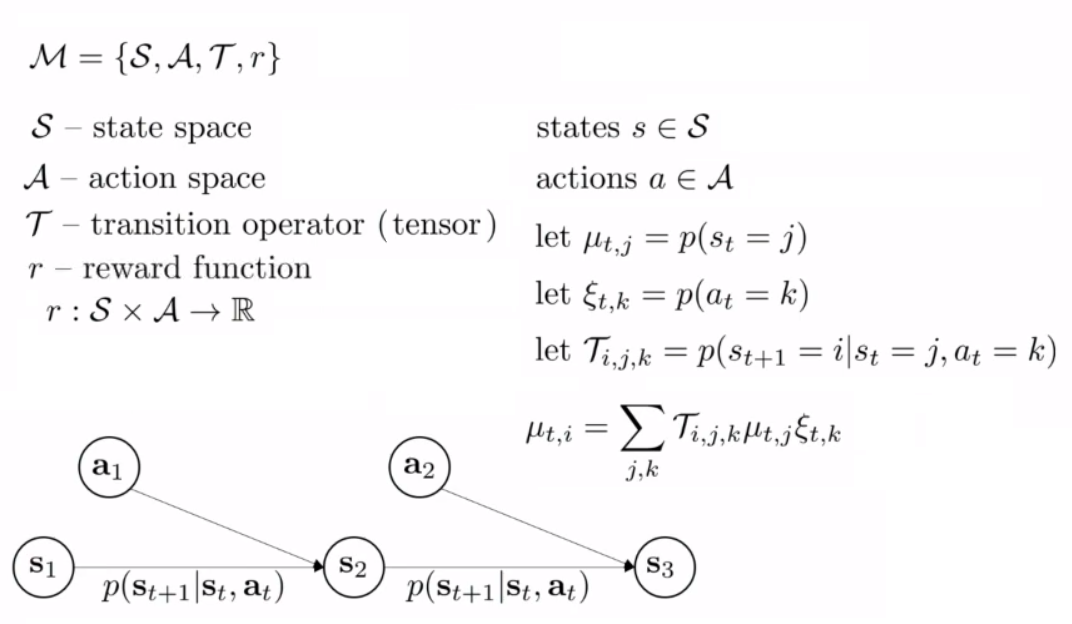
Markov Decision Process
Partially Observed Markov Decision Process
Trainning RL
RL Goal
Goal of RL: Maximize Rewards
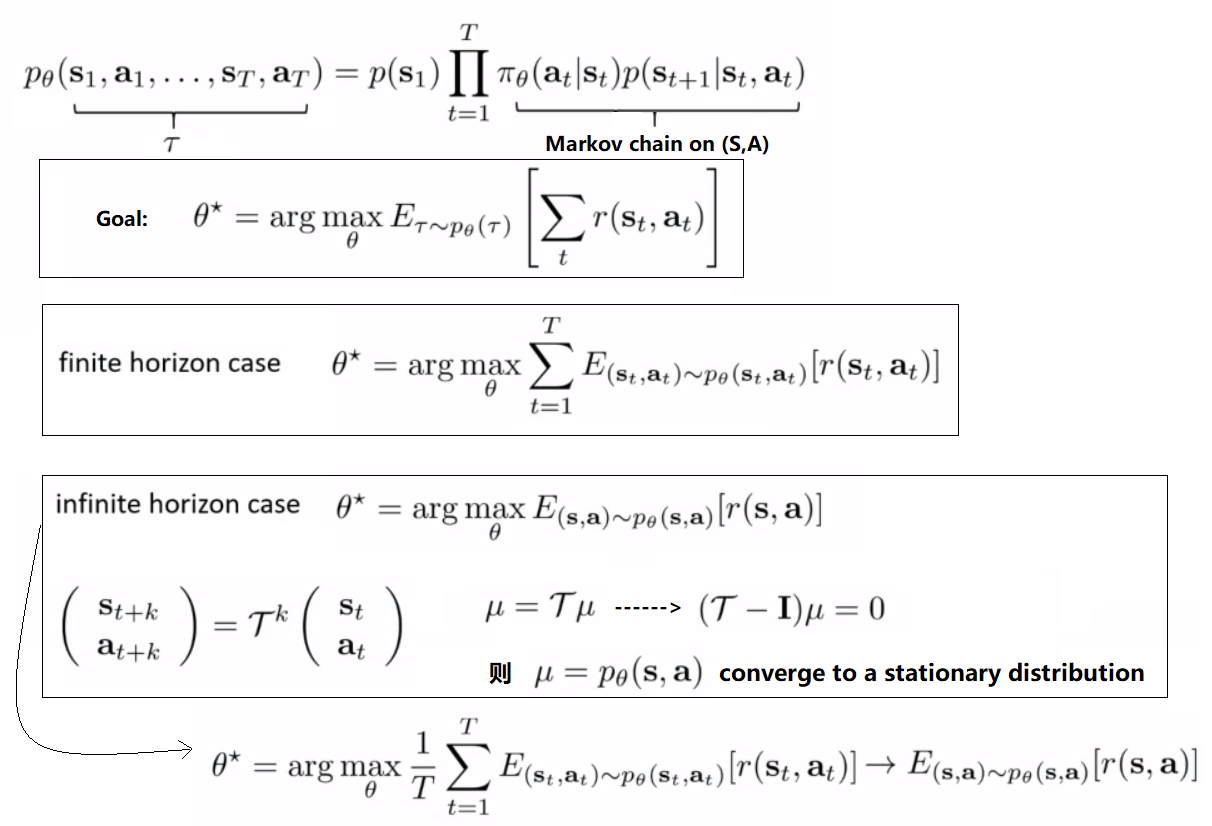
注意,因有时$r(x)$不平滑,我们一般使用平滑的$E_{\pi_{\theta}[r(x)]}$
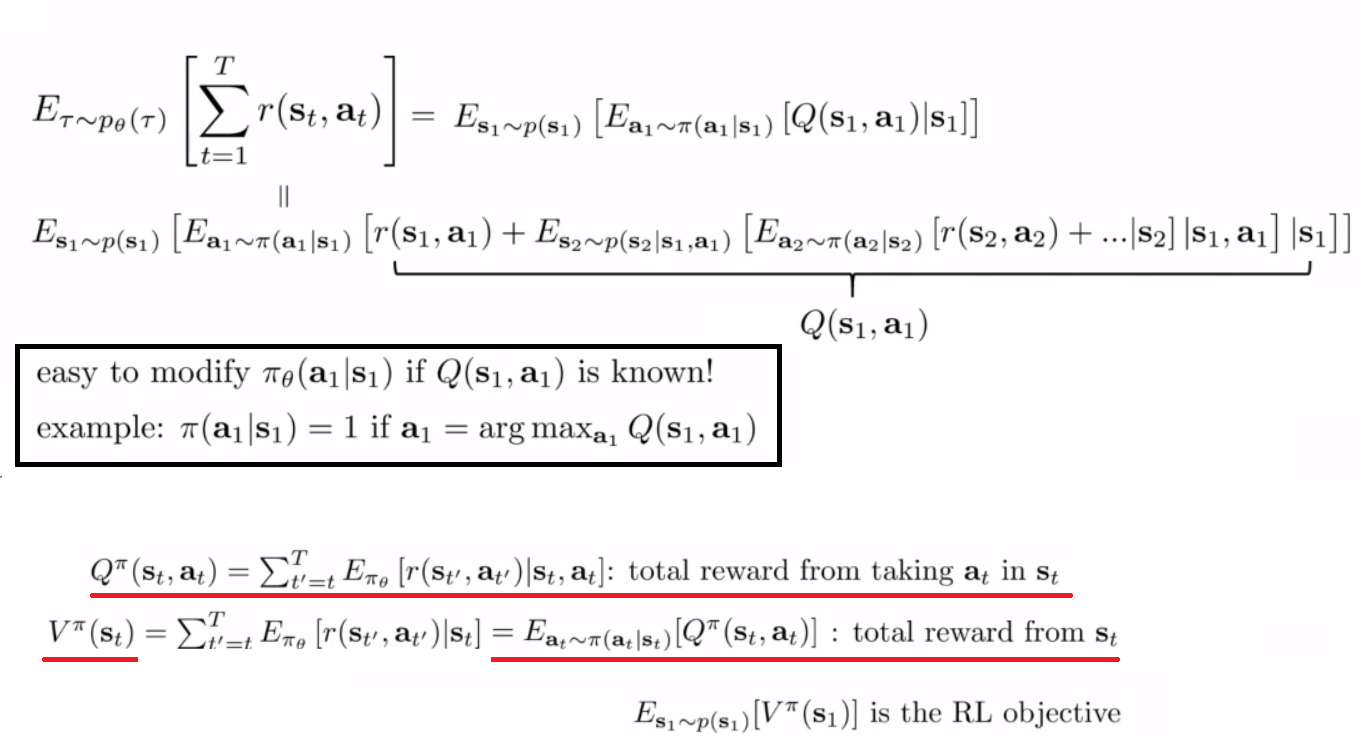
V/Q Function
Q Function- 自$s_t$采取$a_t$后的总累计reward
V Function- 自$s_t$后的总累计reward
Algorithms Overview
选择方法的时候需要考虑Tradeoffs:
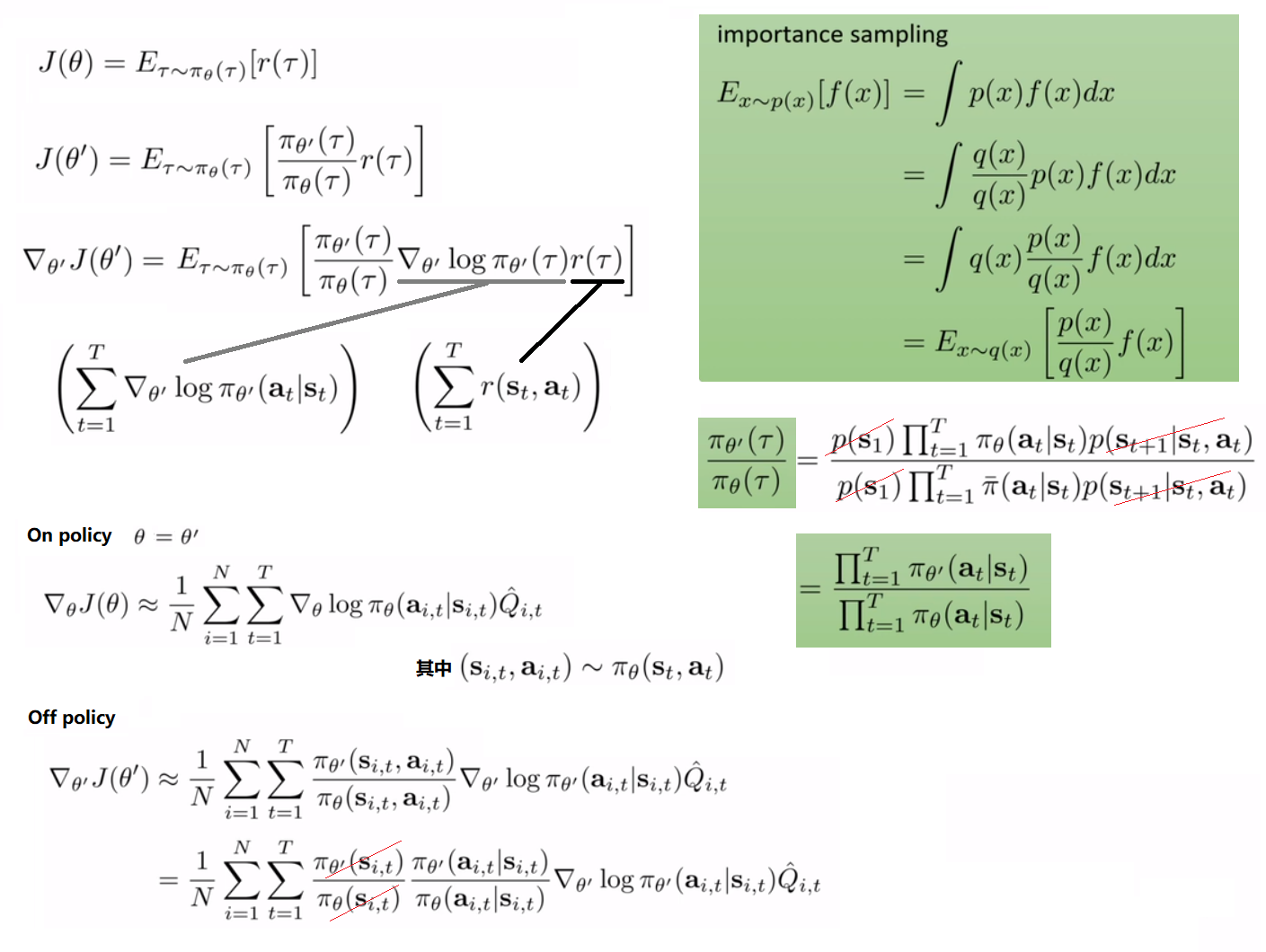
- On Policy - 一旦policy改变,就必须重新采样
- Off Policy - 可以使用旧样本,不过最好配合 Importance Sampling 使用
也需要考虑Assumptions:stochastic/deterministic,连续/离散,周期性/无穷,full/partial observed,....
| -- | 说明 | 其它 |
|---|---|---|
| Direct Policy Gradients | 对Objective直接微分、更新policy: $\theta \leftarrow \theta + \alpha \nabla_{\theta}J(\theta)$ | $$J(\theta) = E_{\pi}[\sum_t{r_t}] \approx \frac{1}{N}\sum_n^N{\sum_{t}{r_t^n}}$$ |
| Value-based | 对 optimal policy 预测 V or Q 后, $\pi(s)=\mathop{\arg\min}\limits_{a}Q(s,a)$ | -- |
| Actor-critic | 对 current policy 预测 V or Q 后, 更新policy: $\theta \leftarrow \theta + \nabla_{\theta}E[Q(s,a)]$ | -- |
| Model-based | 预测transitional model: $p(s_{t+1} | s_t,a_t)$,然后... | 1. planning (no explicit policy) 2. improva policy 3. learn V or Q function ... |
Direct Policy Gradients
类似 Maximum Likelihood -- make high reward Trajectory more probable
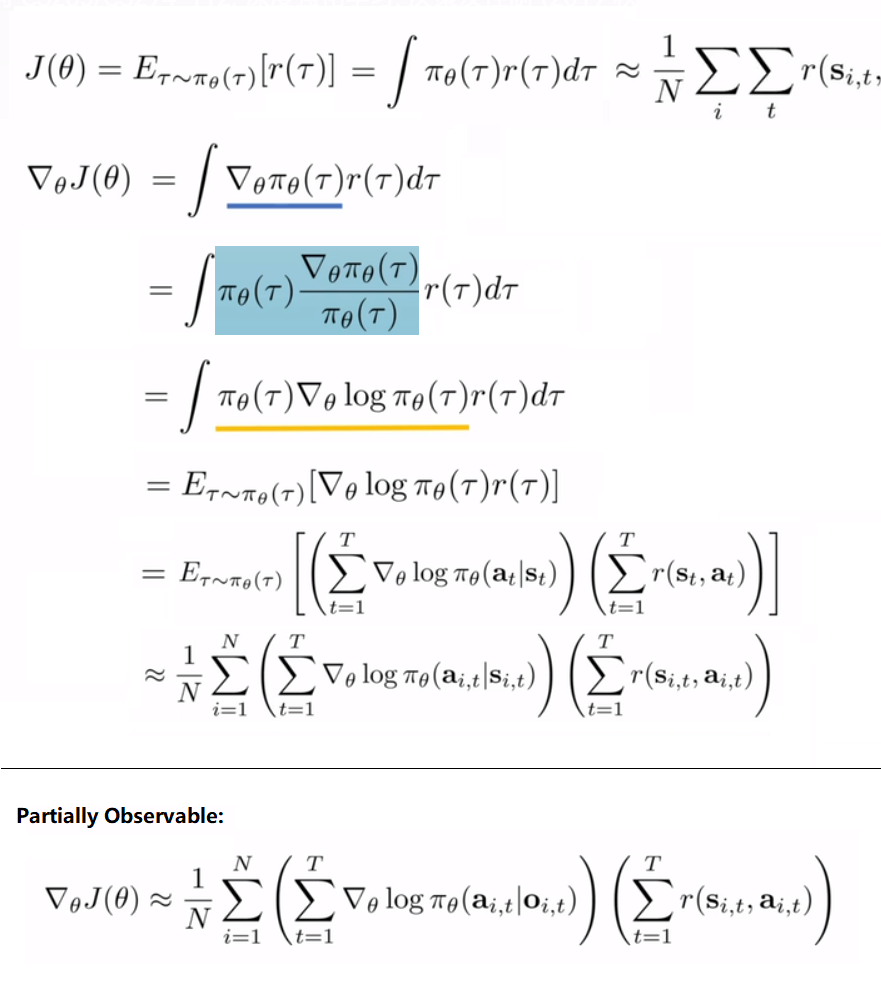
由于$\nabla_{\theta}J(\theta)$非线性,$r(\tau)+constant$可能影响拟合的(虚线) policy 曲线 (probablity & reward);因此当取样数目小时,会有这样的 High Variance 问题
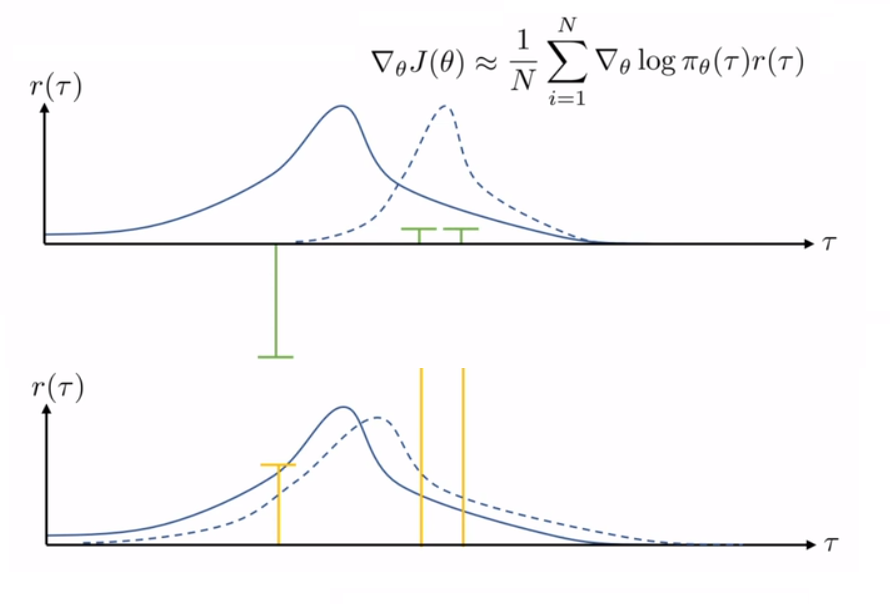
解决 High Variance 问题:
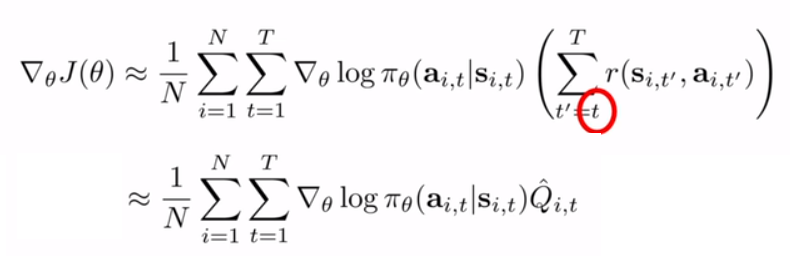
1. Causality: $\theta_{t'}$不能影响 $t<t'$ 时的reward
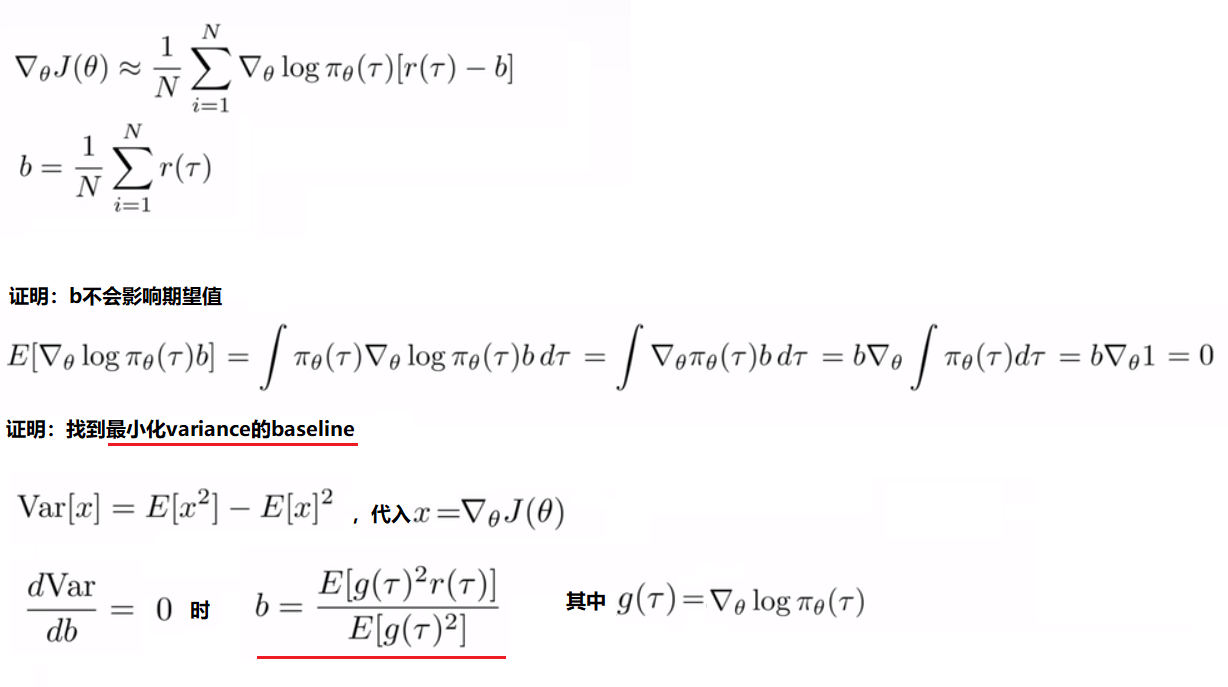
2. Baselines: make 'better than average' more probable
此外,On policy 取样需要每次更新样本,但越 non-linear,每次 gradient 越小;因此可假设 locally $\pi' = \pi$,用 Important Sampling 将 On policy 改编为 Off policy